HOBBYROBOTIK

Die ursprüngliche Internetseite ist im Jahr 2010 Hackern zum Opfer gefallen und konnte leider nicht wiederhergestellt werden.
_____________________________________________________________________________________________________________
Herzlich Willkommen
auf meiner Homepage zum
faszinierenden Thema
Amateur-Robotik

_____________________________________________________________________________________________________________
Ich habe Spaß daran, die vielen kleinen Probleme zu lösen, die sich immer wieder zeigen, wenn man ein solches vielseitiges Hobby betreibt. Man hat die Wahl zwischen vielen Technikbereichen: Elektronik - Mechanik - Software - Physik - ... und ich möchte hier meine Ideen und Erfolge publizieren um einen kleinen Beitrag zu leisten dieses Hobby weiterzuverbreiten.
Zur Veranschaulichen bediene ich mich hier "einfacher" 3D-Animationen und Grafiken die ich mit Freeware Programmen erstellte. Allerdings ist eine derartige Dokumentation sehr zeitraubend, wenn auch reizvoll. Mein Hobby ist aber das Roboterbauen und deshalb wird die ohnehin schon knappe Zeit zum größten Teil dafür verwendet. Die Konstruktionen für die im Video dargestellten Animationen haben etwa 30 Abende gekostet. Auch das Erstellen dieser Internetseite wird das Realisieren meiner Ideen bremsen, aber ich hoffe auf gute Resonanz aus dem Netz, die mir diese Zeit wieder wettmacht.
Das aktuelle Projekt "Grasspinne" (wegen dem spinnenhaften Aussehen) soll im Sommer 2011 abgeschlossen sein.Das heißt,dass der Roboter auf der Grünfläche im Garten unterwegs ist und das Gras auf gleicher Höhe hält. Er "sieht" markante Stellen und erkennt sie wieder als Orientierungspunkte.Damit kann er "wissen" wo er sich befindet und wo schon geschnitten wurde.Er grenzt sein Aktionsgebiet ab, findet den besten "Platz an der Sonne" und macht dort seine Pausen zum Akku laden. Das Schnittmesser ist nur aktiv, wenn auch Gras vorhanden ist. Er gibt ein Warnsignal wenn eine Person sich nähert und bleibt kurz stehen. Er arbeitet auch noch bei Dämmerung, solange die Energie vorhanden ist. Seine einzige Stromquelle sind Solarzellen. Deshalb wird er immer dort "ruhen" wo morgens die Sonne zuerst hinscheint. Woher er das weiß ? Haben sie eine Idee ?
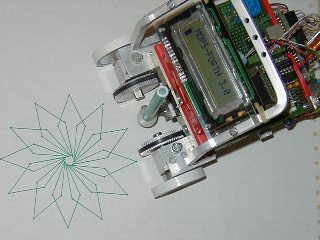
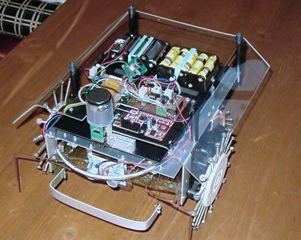
Meine Projekte von damals, bei Entstehung der Hobbyrobotik Homepage, sollen hier auch noch zur Geltung kommen. Leider existiert keiner der Roboter mehr, da ich das Hobby beendet hatte aus Zeitmangel. Nur alles was im PC entworfen oder gespeichert wurde hat überlebt. Der "Kritzler" sollte ein präziser Zeichenroboter werden und war deshalb mit hochauflösenden Steppermotoren ausgestattet und mit speziellem Friktionsgummi bereift.
Ein 68HC11F1 Microcontroller wurde in FORTH programmiert. FORTH ist heute noch 1. Wahl (bei Profis) wenn es um schnelle Problemlösungen für Maschinensteuerungen geht. Ich habe den FORTH-Kern leicht abgeändert und mit einem Maschinencode-Programm ergänzt das ein Signal eines IR-Empfängers erkennt und decodiert. Das machte es möglich eineUniversalfernbedienung als (eingeschränkte ) Eingabetastatur zu nutzen.